Humanoid controller based on visual info
 Because of a standard Jacobian matrix assumed under the same angular velocity in each joints, humanoid robot perform a lean back movement when approaching the object.
We want to adjust the movement of each joint to be more stable and natural, and apply a weighted pseudo-inverse matrix considering a weight value for each joint to standard Jacobian matrix in the update function in the Inverse Kinematics.
Because of a standard Jacobian matrix assumed under the same angular velocity in each joints, humanoid robot perform a lean back movement when approaching the object.
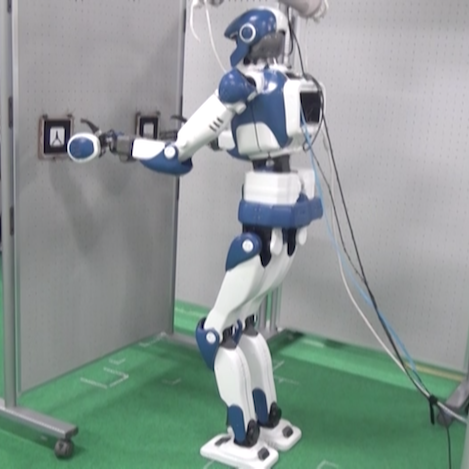
We want to adjust the movement of each joint to be more stable and natural, and apply a weighted pseudo-inverse matrix considering a weight value for each joint to standard Jacobian matrix in the update function in the Inverse Kinematics.To adapt the environment changes, we measure the AR marker using HRP-4’s head USB camera. HRP-4’s dual-arm is controlled to the two AR marker in the robot coordinate system.
Publication
- Satoki Tsuichihara, Akihiko Yamaguchi, Jun Takamatsu, and Tsukasa Ogasawara:
Using a Weighted Pseudo-Inverse Matrix to Generate Upper Body Motion for a Humanoid Robot Doing Household Tasks,
In Proceedings of 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO2015), pp. 333-338, Zhuhai, China, December 6-9, 2015 (Oral Presentation).
[Research gate][bibtex] - 築地原 里樹, 山口 明彦, 吉川 雅博, 高松 淳, 小笠原 司:
ヒューマノイドロボットにおける重み付きヤコビアンを用いた視覚に基づく上半身動作の生成,
第20回ロボティクスシンポジア, 2C2, 2015年3月15-16日.

