Research activity
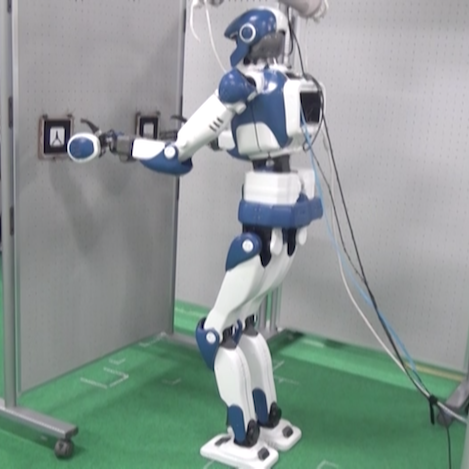
Motion Generation for Humanoid Robots
Humanoid serving coffee
Humanoid controller based on visual info
Real-time humanoid approaching kitchen
Following random target inputs
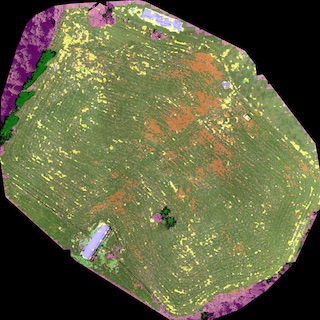
Agriculture Robotics
Grassland Segmentation